






Էլեկտրական շարժիչ ընտրելու համար որոշվում են անհրաժեշտ հզորությունը և պտտվող արագությունը:
Պահանջվող շարժիչի հզորությունը որոշվում է բանաձևով. Եթե T 2 - ելքային լիսեռի մոմենտը (Nm); n 2 - արագությունը ...
Պահանջվող շարժիչի հզորությունը որոշվում է բանաձևով.
Որտեղ Տ 2 - պահ ելքային լիսեռի վրա (Nm);
ն 2 - ելքային լիսեռի ռոտացիայի հաճախականությունը (rpm):
Էլեկտրական շարժիչի պահանջվող հզորության որոշում:
Էլեկտրական շարժիչի պահանջվող հզորությունը որոշվում է բանաձևով

Որտեղ η ռեդուկտոր - փոխանցման տուփի արդյունավետությունը;
Տրված սկավառակի կինեմատիկական դիագրամի համաձայն, փոխանցման տուփի արդյունավետությունը որոշվում է կախվածությունից.
η ռեդուկտոր = η նշանադրություն η 2 առանցքակալներ η միացումներ ,
Որտեղ η նշանադրություն - հանդերձանքի արդյունավետություն; ընդունել η նշանադրություն = 0,97 ;
η առանցքակալներ - զույգ շարժակազմերի առանցքակալների արդյունավետություն; ընդունել η առանցքակալներ = 0,99 ;
η միացումներ - միացման արդյունավետությունը; ընդունել η միացումներ = 0,98 .
Մենք որոշում ենք հեղափոխությունների շարքը, որում էլեկտրական շարժիչի համաժամանակյա արագությունը կարող է տեղակայվել ըստ բանաձևի.
ն սկսած = դուն 2 ,
Որտեղ դու - բեմի հանդերձանքի հարաբերակցությունը; ընտրեք փոխանցման տեմպերի միջակայքը, որը առաջարկվում է գլանաձև փոխանցման տուփի մեկ փուլի համար `2-ից 5 միջակայքում:
օրինակ: ն սկսած = դուն 2 \u003d (2 - 5) 200 \u003d 400 - 1000 պտ / րոպե:
1.4. Էլեկտրական շարժիչի ընտրություն:
Ըստ էլեկտրական շարժիչի պահանջվող հզորության Ռ սպառված (հաշվի առնելով, որ Ռ էլ ≥ Ռ սպառված) և լիսեռի համաժամանակյա արագությունը ն սկսած ընտրեք էլեկտրական շարժիչ.
շարք ... ..
ուժ Ռ \u003d …… կՎտ
սինքրոն արագություն ն սկսած \u003d… ..Բ / րոպե
ասինխրոն արագություն ն 1 \u003d… ..Rpm:

Նկար: 1. Էլեկտրական շարժիչի ուրվագիծ:
1.5. Փոխանցման տուփի փոխանցման տուփի հարաբերակցության որոշում:

Ըստ հանդերձանքի հարաբերակցության հաշվարկված արժեքի, մենք ընտրում ենք ստանդարտ արժեքը, հաշվի առնելով սխալը, մի շարք փոխանցումների հարաբերակցություններից: Մենք ընդունում ենք դու Արվեստ = ….. .
1.6. Փոխանցման տուփի լիսեռների վրա պտտվող արագությունների և մոմենտների որոշում:
Մուտքային լիսեռի արագությունը ն 1 \u003d… .. rpm:
Ելքային լիսեռի արագությունը ն 2 \u003d… .. rpm:
Մոմենտը ելքային լիսեռի անիվի վրա.

Մուտքային լիսեռի փոխանցման մոմենտը.

2. ՓԱԿ ԱՇԽԱՏԱՆՔԻ Հաշվարկը:
2.1. Դիզայնի հաշվարկ:
1. Անիվի նյութի ընտրություն:
օրինակ:
Փոխանցման անիվ
ՀԲ = 269…302 ՀԲ = 235…262
ՀԲ 1 = 285 ՀԲ 2 = 250
2. Որոշեք հանդերձանքի և անիվի ատամների թույլատրելի լարման կոնտակտները :

Որտեղ Հ լիմ - ատամների շփման մակերեսի դիմացկունության սահմանը, որը համապատասխանում է փոփոխական սթրեսների ցիկլերի բազային թվին. որոշվում է ՝ կախված ատամների մակերեսի կարծրությունից կամ թվային արժեքից.
օրինակ: Հ լիմ = 2ՀԲ+70.
Ս Հ - անվտանգության գործոն; միատարր նյութի կառուցվածքով և մակերեսի կարծրությամբ փոխանցումատուփերի համար ՀԲ 350 ֆունտ առաջարկվում է Ս Հ = 1,1 ;
Z Ն - ամրության գործակից; Երկարաժամկետ շահագործման հետ կայուն բեռի ռեժիմով փոխանցումների համար խորհուրդ է տրվում Z Ն = 1 .
Վերջապես, անիվի և հանդերձանքի թույլատրելի շփման սթրեսների երկու արժեքներից փոքրը ընդունվում է որպես թույլատրելի շփման լարվածություն [ Հ ] 2 և [ Հ ] 1:[ Հ ] = [ Հ ] 2 .
3. Որոշեք ատամների ակտիվ մակերեսների շփման կայունության վիճակից կենտրոնական հեռավորությունը .

Որտեղ Ե և այլն - անիվի նյութերի առաձգականության նվազեցված մոդուլ; պողպատե անիվների համար կարող է ընդունվել Ե և այլն \u003d 210 5 ՄՊա;
բա - անիվի լայնության գործակիցը կենտրոնի հեռավորության նկատմամբ. հենարանների նկատմամբ սիմետրիկ տեղակայված անիվների համար, խորհուրդ է տրվում ψ բա = 0,2 – 0,4 ;
Դեպի Հ - բեռի կոնցենտրացիայի գործակիցը շփման լարումների հաշվարկման մեջ:
Որոշել գործակիցը Դեպի Հ անհրաժեշտ է որոշել տրամագծի նկատմամբ փոխանցումատուփի հարաբերական լայնության հարաբերակցությունը ψ բդ : ψ բդ = 0,5ψ բա (դու1) \u003d… ...
Ըստ գործչի գծապատկերի ... .. հաշվի առնելով հանդերձանքի հարաբերակցությունը հենարանների նկատմամբ, կարծրությամբ ՀԲ 350 ՝ գործակցի արժեքով ψ բդ մենք գտնում ենք. Դեպի Հ = ….. .
Մենք հաշվարկում ենք կենտրոնի հեռավորությունը.
օրինակ:
Փոխանցման տուփերի համար կենտրոնի հեռավորությունը կլորացվում է ըստ մի շարք ստանդարտ կենտրոնի հեռավորությունների կամ շարքի Ռա40 .
Մենք հանձնարարում ենք ա Վ \u003d 120 մմ
4. Որոշեք հաղորդման մոդուլը:
մ = (0,01 – 0,02)ա Վ \u003d (0,01 - 0,02) 120 \u003d 1,2 - 2,4 մմ:
Ստացված ընդմիջումից մի շարք մոդուլների համար նշանակեք մոդուլի ստանդարտ արժեքը. մ \u003d 2 մմ
5. Որոշեք հանդերձանքի և անիվի ատամների քանակը:
Փոխանցման և անիվի ատամների ընդհանուր քանակը որոշվում է բանաձևից. ա Վ = մ(զ 1 +զ 2 )/2;
այստեղից զ = 2ա Վ /մ \u003d… ..; ընդունել զ = ….. .
Փոխանցման ատամների քանակը. զ 1 = զ /(դու1) \u003d… ..
Ենթագնահատված հատումները վերացնելու համար զ 1 ≥ զ րոպե ; խթանման մեխանիզմների համար զ րոպե \u003d 17 Մենք ընդունում ենք զ 1 = ….. .
Անիվի ատամների քանակը. զ 2 = զ - զ 1 \u003d .. Առաջարկվում է զ 2 100 .
6. Մենք հստակեցնում ենք հանդերձանքի հարաբերակցությունը:
Որոշեք հանդերձանքի իրական հարաբերակցությունը ՝ օգտագործելով բանաձևը

Հաշվարկված արժեքից իրական հանդերձանքի հարաբերակցության արժեքի սխալ.

Դիզայնի ճշգրտության պայմանը բավարարված է.
Մենք վերցնում ենք փոխանցումատուփի հանդերձանքի հարաբերակցության համար դու փաստ = ….. .
7. Որոշեք հանդերձանքի և անիվի երկրաչափական հիմնական չափերը:
Առանց գործիքի օֆսեթ կտրված անիվների համար.
սկսել շրջանակի տրամագծերը
դ Վ = դ
ներգրավման անկյունը և պրոֆիլի անկյունը
α Վ = α = 20º
բարձրության տրամագիծը
դ 1 = զ 1 մ
դ 2 = զ 2 մ
ատամի ծայրի տրամագիծը
դ ա 1 = դ 1 +2 մ
դ a2 = դ 2 +2 մ
խոռոչի տրամագծերը
դ զ 1 = դ 1 –2,5 մ
դ զ 2 = դ 2 –2,5 մ
ատամի բարձրությունը
ժ = 2,25 մ
օղակաձեւ հանդերձանքի լայնությունը
բ վ = ψ բա ա Վ
հանդերձանքի և անիվի եզերքի լայնությունը
բ 2 = բ վ
բ 1 = բ 2 + (3 - 5) \u003d… ... Մենք ընդունում ենք բ 1 \u003d… .. մմ:
ստուգեք կենտրոնի հեռավորության արժեքը
ա վ = 0,5 (դ 1 + դ 2 )
Worիճուային հանդերձանքը վերաբերում է հատման առանցքի առանցքներով հանդերձանքին:
Որդերի շարժակների հիմնական առավելությունները. Մեկ զույգում մեծ փոխանցումային գործակիցներ ստանալու ունակություն, սահուն ներգրավում, ինքնալուսացման հնարավորություն: Թերություններ. Համեմատաբար ցածր արդյունավետություն, ավելացել է մաշվածությունը և բռնագրավելու միտում, անիվների համար հակատանկային թանկարժեք նյութեր օգտագործելու անհրաժեշտություն:
Wիճու փոխանցումատուփերն ավելի թանկ և բարդ են, քան փոխանցումայինները, ուստի դրանք օգտագործվում են, որպես կանոն, երբ անհրաժեշտ է շարժում տեղափոխել հատման լիսեռների միջև, ինչպես նաև այն դեպքում, երբ անհրաժեշտ է հանդերձանքի մեծ հարաբերակցություն:
Worիճուների շարժակների սպասարկման չափանիշը ատամների մակերեսային ամրությունն է, որն ապահովում է դրանց մաշվածության դիմադրությունը և ճաքճքման և խցանման բացակայությունը, ինչպես նաև ճկման ուժը: Կարճաժամկետ ծանրաբեռնվածության ճիճուների շարժման մեջ գործելիս ճիճու անիվի ատամները ստուգվում են առավելագույն բեռով կռանալու համար:
Worիճու մարմնի համար կատարվում է կոշտության փորձարկման հաշվարկ, ինչպես նաև ջերմային հաշվարկ:
Դիզայնը իրականացվում է երկու փուլով. Ձևավորում `շփման դիմացկունության պայմաններից ելնելով, որոշվում են փոխանցման հիմնական չափերը և ստուգում` հայտնի հաղորդման պարամետրերով `իր գործունեության պայմաններում, որոշվում են շփման և ճկման սթրեսները և համեմատվում թույլատրելի նյութի դիմացկունության հետ:
Առանցքակալները բեռնող ուժերը որոշվում են, և առանցքակալներն ընտրվում են ըստ դրանց կրողունակության:
Նախնական նախագծման տվյալների համաձայն ՝ տեխնոլոգիական գործընթացն ավարտելու համար անհրաժեշտ հզորությունը կարելի է գտնել բանաձևից.
Р դուրս \u003d F t V, (2.1)
որտեղ Р- դուրս - հոսանք սկավառակի ելքի լիսեռում, Վ;
F t - ձգողական ջանք, N;
V - աշխատանքային մարմնի շարժման արագությունը, մ / վ;
P դուրս \u003d 1,5 կՎտ:
Հետո, էլեկտրաէներգիայի փոխանցման կինեմատիկական շղթային համապատասխան, ընդհանուր K.P.D. ամբողջ սկավառակը հաշվարկվում է բանաձևով.
z ընդհանուր \u003d z 1 z 2 z 3 z 4 (2.2)
s ընդհանուր \u003d 0.80.950.980.99 \u003d 0.74:
Այսպիսով, ելնելով ընդհանուր K.P.D. պարզ դարձավ, որ շարժիչի շահագործման ընթացքում շարժիչից ստացված էներգիայի միայն 74% -ն է ուղղվելու վինչի թմբուկին:
Որոշեք պտուտակի բնականոն աշխատանքի համար անհրաժեշտ շարժիչի հզորությունը.
Մենք ընդունում ենք 2.2 կՎտ հզորությամբ շարժիչ:
Քանի որ այս փուլում շարժիչ շարժակների փոխանցման տեմպերի հարաբերակցությունը դեռ անհայտ է, և շարժիչի լիսեռի պտտման արագությունը հայտնի չէ, հնարավոր է դառնում հաշվարկել էլեկտրական շարժիչի լիսեռի ցանկալի պտտվող արագությունը:
Դրա համար կատարվել են հետևյալ հաշվարկները:
Ըստ նախնական տվյալների, ելքային լիսեռի անկյունային արագությունը հաշվարկվում է բանաձևով.
որտեղ u է անկյունային արագությունը, s -1;
D b - թմբուկի տրամագիծը, մ;
v - աշխատանքային մարմնի շարժման արագությունը, մ / վ:
Եկեք գտնենք պտտման հաճախականությունը ՝ բանաձևով իմանալով անկյունային արագությունը.
rpm (2.5)
Էլեկտրական մղիչի շարժիչի կինեմատիկական դիագրամի վերլուծությունից կարելի է տեսնել, որ դրա ընդհանուր հանդերձանքի հարաբերակցությունը (u ընդհանուր) ձեւավորվում է որդերի հանդերձանքի ռեդուկտորի հանդերձանքի հարաբերակցության շնորհիվ:
Մենք վերցնում ենք u chp \u003d 50. Շարժիչի լիսեռի n dv- ի և ելքային լիսեռի պտտման հաճախականությունների միջև հարաբերությունը որոշվում է այդ հարաբերությամբ.
n dv \u003d n s u ընդհանուր, (2.6)
ապա շարժիչի լիսեռի ցանկալի արագությունը կլինի.
n dv \u003d 38.250 \u003d 1910 rpm.
Ըստ շարժիչների մատչելի շարքի, ցանկալի արագությանը ամենամոտ մեկը `1500 պտ / րոպե սինքրոն արագությամբ շարժիչ է: Հաշվի առնելով վերոգրյալը ՝ մենք վերջապես ընդունում ենք շարժիչի մակնիշը ՝ 90L4 / 1395: AIR շարքը, որն ունի հետևյալ բնութագրերը.
P dv \u003d 2.2 կՎտ;
n դուռ \u003d 1500 rpm:
Ամբողջ փոխանցման գործակիցը:
u ընդհանուր \u003d n dv / \u003d 1500 / 38,2 \u003d 39,3:
Մենք որոշելու ենք կանխատեսվող սկավառակի բոլոր կինեմատիկական բնութագրերը, որոնք հետագայում անհրաժեշտ կլինեն փոխանցման տուփի մանրամասն ուսումնասիրության համար: Պտտման հաճախականության և արագությունների որոշում: Բոլոր լիսեռների պտտման արագությունները կարելի է հեշտությամբ հաշվարկել `սկսած էլեկտրական շարժիչի լիսեռի ընտրված ռոտացիոն արագությունից` հաշվի առնելով այն փաստը, որ յուրաքանչյուր հաջորդ լիսեռի ռոտացիոն արագությունը որոշվում է նախորդի (2.7) բանաձևի պտտման արագության միջոցով `հաշվի առնելով հանդերձանքի հարաբերակցությունը.
որտեղ n (i + 1) - ը i + 1 լիսեռի պտտման արագությունն է, rpm;
u i - (i + 1) - փոխանցման տուփի հարաբերակցությունը i- ի և i + 1 լիսեռների միջև:
Պահերը փոխանցման տուփի լիսեռների վրա.
T 1 \u003d 9.5510 3 (P / n ե) \u003d 9.5510 3 (2.2 / 1500) \u003d 14.0 Nm
T 2 \u003d T 1 u \u003d 14.039.3 \u003d 550 Նմ:
Էլեկտրամեխանիկական սկավառակի նախագծման նախնական տվյալները յուրաքանչյուր ուսանողի կողմից ընտրվում են Աղյուսակ 1-ից. հզորություն - ըստ ծածկագրի վերջին նիշիձեր գրառումների գիրքը; արագություն - ըստ ծածկագրի նախավերջին թվանշանիձեր գնահատականի գիրքը:
Աղյուսակ 1 - Առաջադրանք 6-ի գործի նախնական տվյալները
|
Պարամետրի անվանումը |
Ընտրանքներ |
|||||||||
|
Քշել ուժը Ռ ԵԼՔ (կՎտ) ելքային լիսեռում |
||||||||||
|
Ելքային լիսեռի արագությունը ն ԴՈՒՐՍ (րոպե -1) |
||||||||||
|
Շարժիչի լիսեռի ռոտացիոն արագություն - մուտքային լիսեռ ն BX (րոպե -1) |
||||||||||
6.1. Տեղեկություն տեղեկանքի համար
Ուժ ժամանակի միավորի վրա կատարված աշխատանքը բնութագրող արժեք է, կամ ուժ, որի կիրառման կետը շարժվում է որոշակի արագությամբ:
Էլեկտրաէներգիայի միավորը վտ է (Վտ). 1 Վտ է այն ուժը, որով կատարվում է 1 ((ջոուլ) աշխատանքը 1 վ-ի ընթացքում:
Խնդիրի մեջ օգտագործվում է վտ-ի ածանցյալը `կիլովատ` 1 կՎտ \u003d 1000 Վտ:
Հաշվարկներում պետք է հիշել, որ նախնական տվյալներում սահմանվում է էներգիայի քանակը, որն անհրաժեշտ է մղիչը (փոխակրիչ և այլն), և պահանջվում է որոշել էլեկտրական շարժիչի հզորությունը, որը բավարար կլինի ամբողջ մեխանիկական շարժիչը և մղիչը պտտելու համար ՝ հաշվի առնելով պայմանները շարժիչով աշխատելը:
Լիսեռի արագությունը արժեք է, որն արտահայտում է լիսեռի ամբողջական պտույտների քանակը իր առանցքի շուրջ մեկ րոպեի ընթացքում:
Էլեկտրամեխանիկական սկավառակի ելքային լիսեռը գոտիի շարժիչի օգտագործման դեպքում ցածր արագությամբ փոխանցման տուփի լիսեռ է, որը կոշտ միացման միջոցով միացված է մղիչի գործառնական լիսեռին, շղթայական շարժիչի դեպքում `մղիչի գործառնական լիսեռին, որի վրա ամրացված է մեծ ատամնավոր:
Արագության չափման միավորների նշանակում. ն (րոպե -1):
Կրթական և տեղեկատու գրականության հին հրատարակություններում լիսեռի արագությունը չափվում է րոպեների պտույտներով և նշվում. ն (rpm) Քանակականորեն, չափման միավորների այս երկու հատկություններն էլ հավասար են միմյանց, բայց պետք է օգտագործել առաջին նշումը. ն (րոպե -1):
Համառոտ տեղեկատվություն էլեկտրամեխանիկական սկավառակի սարքի մասին
Էլեկտրամեխանիկական սկավառակ - էլեկտրական շարժիչով բաց և փակ մեխանիկական փոխանցումների համակարգ `տարբեր մղիչ սարքեր վարելու համար, օրինակ` փոխակրիչ:
Բաց փոխանցումները (գոտի կամ շղթա) սովորաբար բաղկացած են մի քանի մասից. Հեղափոխության երկու մարմին (ճախարակներ կամ ատամնավորներ) տարբեր տրամագծերով, յուրաքանչյուրը կոշտորեն ամրացված է իր լիսեռի վրա և միմյանց փոխանցում է մոմենտը ճկուն կապի միջոցով (գոտի կամ շղթա):
Փակ մեխանիկական փոխանցումատուփը հանդերձանքի կրճատիչ է, որը փակ է պատյանով արտաքին ազդեցությունից, պարունակում է հանդերձանքի անիվներ և փոխանցումատուփեր և նախագծված է պտտվող շարժում փոխանցելու համար ելքային լիսեռի պտտման արագության իջեցմամբ (փոխակրիչի կողմից) ՝ համեմատած մուտքային լիսեռի (էլեկտրական շարժիչի կողմից)
Coaxial (տեղակայված է մեկ երկայնական առանցքի վրա) լիսեռները միացված են ագույցներով:
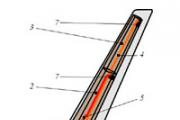
Նկար 1-ը ցույց է տալիս գոտու փոխակրիչի հաշվարկների համար սահմանված էլեկտրամեխանիկական շարժիչի կինեմատիկական դիագրամը:
Նկար 1 - Էլեկտրամեխանիկական շարժիչի կինեմատիկական դիագրամ դեպի գոտի փոխակրիչ
Սկավառակը բաղկացած է էլեկտրական շարժիչից `1, հատուկ կցորդիչ 2, գոտիի շարժիչ 3, փոխանցումատուփ 10, շղթայական շարժիչ 13. Էլեկտրական շարժիչի 1 լիսեռը կցորդիչ 2-ի միջոցով միացված է V- գոտիի շարժիչի 3-ի փոքր ճախարակի 5-ի լիսեռին, որը փոխանցում է ռոտացիան և լրացուցիչ փոխհատուցում լիսեռի անսարքությունը: Փոքր ճախարակ 5-ի լիսեռը տեղադրված է առանձին շարժակազմերի առանցքակալների մեջ: Փոքր ճախարակից 5 դեպի մեծ ճախարակը 6 պտտումը փոխանցվում է V գոտու միջոցով: Մեծ պտույտ 6-ից, արագընթաց մուտքային լիսեռի 7-ով պտտումը, ատամնավոր անիվներն ու փոխանցումատուփերը և փոխանցման տուփի միջանկյալ առանցքը (գծապատկերում համարակալված չէ) փոխանցվում են փոխանցման տուփի 10-ի ցածր արագությամբ ելքային լիսեռին: Այնուհետև, կցորդիչ 2-ի միջոցով, ռոտացիան տեղափոխվում է 12-րդ փոքր ճարմանդ 11-ի առանձին լիսեռ, տեղադրված է առանձին Առանցքակալներ շարժակազմով առանցքակալներով, իսկ մի փոքր ատամնավոր 12-ից `ամրացման շղթայի միջոցով` դեպի մեծ ատամնավոր 14-ը, որը կցված է 15-ի շարժիչի 15-ի աշխատանքային լիսեռի վերջում `գոտու փոխակրիչով:
6.2. Սկավառակի հզորության պարամետրերի որոշում
6.2.1. Էլեկտրական շարժիչի ընտրություն
Մուտքային հզորություն Ռ BX (կՎտ) շարժիչի լիսեռի վրա, որի արժեքը կապահովի շարժիչի ելքային լիսեռի սահմանված հզորությունը Ռ ԵԼՔ (կՎտ), որոշվում է ՝ հաշվի առնելով շարժիչի բոլոր տարրերի (COP) ընդհանուր արդյունավետությունը - η , այսինքն ՝ էներգիայի ընդհանուր կորուստները.
Տրված սկավառակի ընդհանուր արդյունավետությունը որոշվում է բանաձևով.
Որտեղ η ՌՊ - գոտու փոխանցման արդյունավետությունը. η Ռ - փոխանցման տուփի արդյունավետությունը; η Պրոցեսոր - շղթայի փոխանցման արդյունավետություն; η Պ - մեկ զույգ շարժակազմի առանցքակալների արդյունավետություն. η Մ - միացման արդյունավետությունը, Հ- կրող զույգերի քանակը; Դեպի- լիսեռների միջեւ միացումների քանակը:
Արդյունավետության արժեքները տարբեր շարժիչ տարրերի համար.
v- գոտի փոխանցումատուփ - 0.95;
ռեդուկտոր –0,97;
շղթայական շարժիչ - 0,90;
կալանք - 0,98;
մեկ զույգ առանցքակալներ `0.99:
Գտնված արժեքը Ռ BX համեմատել տեղեկատու գրականության տվյալների հետ
Եվ ընտրեք էլեկտրական շարժիչի անվանական հզորությունը Ռ ԱՆՈՄ մոտակա բարձրագույն արժեքով, քանի որ պայմանը պետք է բավարարվի.
6.2.2. Յուրաքանչյուր շարժիչի լիսեռով փոխանցվող էներգիայի հաշվարկ
Հզորությունը որոշվում է `հաշվի առնելով շարժիչի բոլոր տարրերի արդյունավետության արժեքները և դրանց քանակը, որոնք տեղակայված են շարժիչի լիսեռից մինչև լիսեռ, որի հզորությունը հաշվարկվում է. Կա՞ մեխանիկական փոխանցում, իսկ հաշվարկված լիսեռի վրա կա կցորդիչ և քանի զույգ առանցքակալներ կան այս բաժնում:
1. Առաջին շարժիչի լիսեռով (կՎտ) փոխանցվող հզորություն `փոքր V- գոտու պտուտակի լիսեռով.
Ռ Ես \u003d Պ BX · η Մ · η Պ .
2. Երկրորդ շարժիչով լիսեռով փոխանցվող հզորությունը (կՎտ) - փոխանցման տուփի մուտքային լիսեռով V գոտի փոխանցումից հետո.
Պ II = Պ Ես · η ՌՊ · η Պ .
3. Երրորդ շարժիչով լիսեռով փոխանցվող հզորությունը (կՎտ) - փոխանցման տուփի ելքային լիսեռը.
Պ Ես Ես Ես = Պ Ես Ես · η Ռ · η Մ · η 3 Պ .
4. Չորրորդ շարժիչով լիսեռով փոխանցվող հզորություն (կՎտ) - ելք
շղթայի շարժիչի մեծ ատամի լիսեռ - մղիչի աշխատանքային լիսեռ:
Պ Ես Վ = Պ Ես II · η Պրոցեսոր · η Պ .
6.3. Սկավառակի կինեմատիկական պարամետրերի որոշում
6.3.1. Հաղորդման փոխանցման տուփի փոխանցման տուփի գործակիցների հաշվարկ
1. Սկավառակի հանդերձանքի հարաբերակցությունը.
Ուղղորդիչի հանդերձանքի հարաբերակցությունը ՈւԵԼՔ V- գոտու փոխանցումատուփի հարաբերակցության արդյունք է Ու PEM , շղթա Ու ՇՂԹԱ հանդերձում և հանդերձում իջեցնող Ու Ռ , այսինքն ՝
Ու ԵԼՔ = Ու PEM Ու Ռ Ու ՇՂԹԱ .
Բազմապատկիչների արժեքների հաշվարկը սկսվում է ըստ ստանդարտ արժեքների Ts2U-315N փոխանցումատուփի հանդերձանքի հարաբերակցության նշանակման հետ և հետագա հաշվարկն իրականացվում է այս համարի նկատմամբ `կատարելով պայմանը, որ բաց շարժակների փոխանցման տեմպերը նույնպես լինեն թույլատրելի արժեքների մեջ. V գոտիների համար` 1.5 ... 4, շղթայի համար `2 5 ֆունտ Որպեսզի բաց շարժակների ընդհանուր չափերը չափազանց մեծ չլինեն, պետք է պահպանել առաջարկվող հանդերձանքի գործակիցների նվազագույն արժեքները ՝ առանց դրանց ամենաբարձր մակարդակի հասցնելու:
6.3.2. Յուրաքանչյուր շարժիչի լիսեռի արագության հաշվարկը
Լիսեռների արագությունը որոշվում է ՝ հաշվի առնելով V գոտիի շարժիչի, փոխանցումատուփի և շղթայի շարժիչի հաշվարկված հանդերձանքի գործակիցները:
1. Առաջին լիսեռի պտտման հաճախականությունը (էլեկտրական շարժիչի լիսեռով համասեռ) (րոպե -1):
ն Ես = ն BX .
2. Երկրորդ շարժիչի լիսեռի պտտման հաճախականությունը (րոպե -1) - V- գոտու փոխանցումից հետո փոխանցման տուփի մուտքային (գերարագ) լիսեռ.
3. Երրորդ շարժիչի լիսեռի պտտման հաճախականությունը (րոպե -1) - փոխանցման տուփի ելքային լիսեռ:
4. Չորրորդ շարժիչային լիսեռի պտտման հաճախականությունը (րոպե -1) - խոշոր շղթայի ատամնաշարի լիսեռ - մղիչի աշխատանքային լիսեռ:
6.4. Յուրաքանչյուր շարժիչի լիսեռի վրա պտտող մոմենտի հաշվարկը
Մոմենտ Տ(Nm) յուրաքանչյուր շարժիչի լիսեռով փոխանցվողը որոշվում է `հաշվի առնելով հզորությունը Ռ (կՎտ) և լիսեռի արագությունը ն (րոպե -1):
1. Առաջին շարժիչի լիսեռի համար.
2. Երկրորդ շարժիչի լիսեռի համար.
3. Երրորդ շարժիչի լիսեռի համար.
4. Չորրորդ շարժիչային լիսեռի համար.
6.5. Հաշվարկների արդյունքում ստացված տվյալներն ամփոփված են աղյուսակում:
Աղյուսակ 2. Բեռնվածքի և կինեմատիկական բնութագրերը լիսեռների վրա
|
P, (կՎտ) |
ն, (րոպե -1 ) |
Տ, (Նմ) |
|
Ռուսաստանի Դաշնության կրթության և գիտության նախարարություն:
Կրթության դաշնային գործակալություն:
Բարձրագույն մասնագիտական \u200b\u200bկրթության պետական \u200b\u200bուսումնական հաստատություն:
Սամարայի պետական \u200b\u200bտեխնիկական համալսարան:
Բաժին. «Կիրառական մեխանիկա»
Ուսանող 2 - HT - 2
Ղեկավար ՝ բ.գ.թ., դոցենտ
Թիվ 65 տեղեկանքի պայմանները:
Կռնային հանդերձանք:
Շարժիչի լիսեռի պտտվող արագությունը.
.Մոմենտը փոխանցման տուփի ելքային լիսեռի վրա.
.Ելքային լիսեռի արագությունը.
.Նվազեցնել ծառայության ժամկետը տարիների ընթացքում.
.Տարվա ընթացքում փոխանցման տուփի բեռի գործակիցը.
.Օրվա ընթացքում փոխանցման տուփի բեռի գործակիցը.
.1. Ներածություն ___________________________________________________________ 4
2. Սկավառակի կինեմատիկական և հոսանքի հաշվարկ __________________________ 4
2.1. Փոխանցման տուփի լիսեռի արագության որոշում ______________________ 4
2.2. Անիվի ատամների քանակի հաշվարկ __________________________________________ 4
2.3. Փոխանցման փաստացի գործակիցի որոշում _______________ 5
2.4. Փոխանցման տուփի արդյունավետության որոշում _______________________________________ 5
2.5. Յուրաքանչյուր լիսեռի անվանական բեռի պահերի որոշում, մեխանիզմի դիագրամ ___________________________________________________ 5
2.6. Պահանջվող հզորության հաշվարկը և էլեկտրական շարժիչի ընտրությունը, դրա չափերը ___ 5
3. Նյութերի ընտրություն և թույլատրելի լարումների հաշվարկ _________________ 7
3.1. Նյութերի կարծրության որոշում, հանդերձանքի համար նյութի ընտրություն ____________________________________________________________ 7
3.2. Թույլատրելի սթրեսների հաշվարկ _________________________________7
3.3. Թույլատրելի սթրեսը շփման կայունության համար ______________ 7
3.4. Թույլատրելի ճկուն սթրեսներ ________________ 8
4. Փոխանցման ձևավորման և ստուգման հաշվարկ __________________________ 8
4.1. Փոխանցման փոխանցման նախնական բարձրության տրամագծի հաշվարկը ______ 8
4.2. Նախնական փոխանցման մոդուլի հաշվարկը և դրա ճշգրտումը `համաձայն ԳՕՍՏ ___________________________________________________________ 8-ի
4.3. Հաղորդման երկրաչափական պարամետրերի հաշվարկ _______________________ 8
4.4. Փոխանցման ստուգման հաշվարկ ___________________________________ 9
4.5. Hingանցային ուժեր ___________________________________________ 9
5. Լիսեռի նախագծում և առանցքակալների ընտրություն ______________________12
6. Էսքիզների դասավորություն և կառուցվածքային տարրերի հաշվարկ _______________ 12
6.1. Ատամնաքարի հաշվարկ ________________________________________ 12
6.2. Մարմնի տարրերի հաշվարկը ______________________________________ 13
6.3. Քսուք օղակների հաշվարկը _______________________________ 13
6.4. Առանցքակալի գլխարկի հաշվարկ ________________________________ 13
6.5. Հատակագծի գծագրի կատարում __________________________ 13
7. Հիմնուղիների միացումների ընտրություն և ստուգում հաշվարկ _______________14
8. Լիսեռի հաշվարկը հոգնածության դիմացկունության համար ______________ 15
9. Ստուգիչ ելքի լիսեռի առանցքակալների հաշվարկի կայունությունը ___ 18
10. Կցորդի ընտրություն և հաշվարկ ___________________________ 19
11. Փոխանցման տուփի քսում ____________________________________________ 19
12. Հիմնական փոխանցումատուփի հավաքույթների հավաքում և կարգաբերում ___________________ 20
13. Օգտագործված գրականության ցուցակ ______________________________ 22
14. Հավելվածներ __________________________________________________ 23
Ներածություն
Փոխանցման տուփը մեխանիզմ է, որը բաղկացած է հանդերձանքից կամ ճիճու փոխանցումատուփերից, որը պատրաստված է առանձին միավորի տեսքով և ծառայում է շարժիչի լիսեռից պտտումը աշխատանքային մեքենայի լիսեռին փոխանցելու համար:
Փոխանցման տուփի նպատակն է իջեցնել անկյունային արագությունը և, համապատասխանաբար, շարժիչ լիսեռի մոմենտը մեծացնելը `համեմատած շարժիչայինի հետ:
Փոխանցման տուփը բաղկացած է պատյանից (չուգուն կամ եռակցված պողպատ), որի մեջ տեղադրված են փոխանցման տարրեր `փոխանցումատուփեր, հանքեր, առանցքակալներ և այլն: Որոշ դեպքերում փոխանցումատուփի և կրիչի յուղման սարքերը կամ հովացման սարքերը տեղադրվում են նաև փոխանցման տուփի պատյանում:
Փոխանցման տուփերը դասակարգվում են ըստ հետևյալ հիմնական հատկանիշների. Փոխանցման տիպ (փոխանցումատուփ, ճիճու կամ փոխանցումատուփ); փուլերի քանակը (մեկ փուլ, երկու փուլ և այլն); փոխանցումատուփերի տեսակը (գլանաձեւ, թեք, թեք-գլանաձև և այլն); փոխանցումատուփի լիսեռների հարաբերական դիրքը տարածության մեջ (հորիզոնական, ուղղահայաց); կինեմատիկական սխեմայի առանձնահատկությունները (ընդլայնված, coaxial, երկբաժանի փուլով և այլն):
Կտրուկ փոխանցումատուփերն օգտագործվում են լիսեռների միջև շարժումը փոխանցելու համար, որոնց առանցքները սովորաբար հատվում են 90 անկյան տակ: 90-ից բացի այլ անկյուններով հանդերձանքները հազվադեպ են:
Կտրուկ փոխանցումատուփի ամենատարածված տեսակը ուղղահայաց ցածր արագությամբ լիսեռ փոխանցումատուփն է: Հնարավոր է նախագծել փոխանցումատուփը ուղղահայաց տեղակայված գերարագ լիսեռով; այս դեպքում շարժիչն իրականացվում է եզրային էլեկտրական շարժիչի միջոցով
Միակողմանի թեք փոխանցումատուփերի հանդերձանքի հարաբերակցությունը u, որպես կանոն, ոչ ավելի, քան 3; հազվագյուտ դեպքերում u \u003d 4, թեք կամ կոր ատամներով u \u003d 5 (որպես բացառություն, u \u003d 6.3):
Պտտաձև գերանի փոխանցումատուփ ունեցող հանդերձանքների համար ծայրամասային թույլատրելի արագությունը (միջին տրամագծի սկիպիդար շրջանի երկայնքով) v ≤ 5 մ / վ է: Ավելի մեծ արագությամբ շրջանաձեւ ատամներով շրջադարձ ատամնանիվները խորհուրդ են տրվում ավելի սահուն ներգրավման և կրելու ավելի մեծ կարողության համար:
2 Սկավառակի կինեմատիկական և հզորության հաշվարկը:
2.1 Փոխանցման տուփի լիսեռի արագության որոշում.
.Առաջին (մուտքային) լիսեռի ռոտացիայի հաճախականությունը.
.Երկրորդ (ելքային) լիսեռի ռոտացիայի հաճախականությունը.
.2.2 Փոխանցման ատամների քանակի հաշվարկ:
Հաշվարկված ատամնաբուժական ատամների քանակը
որոշվում է կախված փոխանցման տուփի փոխանցման տեմպի արժեքից.Արժեքը
կլոր դեպի ամբողջ թիվ ՝ ըստ մաթեմատիկայի կանոնների.Անիվի ատամների գնահատված քանակը
հանդերձանքի հարաբերակցության իրականացման համար անհրաժեշտ որոշվում է կախվածությունից.Արժեքը
կլորացնել ամբողջ թվին.2.3 Փոխանցման փաստացի հարաբերակցության որոշում.
.2.4 Փոխանցման տուփի արդյունավետության որոշում:
Թեք հանդերձանքի համար
.Պտտվող (բեռի) պահը փոխանցման տուփի ելքային լիսեռի վրա.
.Մուտքային լիսեռի վրա.
.2.5 Յուրաքանչյուր լիսեռի անվանական բեռի պահերի որոշում, մեխանիզմի դիագրամ:
Հզորությունը փոխանցման տուփի ելքային լիսեռում, կՎտ.
կՎտ, որտեղ `- ելքային լիսեռի ոլորող մոմենտը, - ելքային լիսեռի արագությունը:Էլեկտրական շարժիչի գնահատված հզորությունը:
1 Մոմենտ փոխանցման տուփի ելքային լիսեռի վրա M2 [Nm]
Փոխանցման տուփի ելքային լիսեռի ոլորող մոմենտը փոխանցումատուփի ելքային լիսեռին մատակարարվող մոմենտն է, սահմանված անվանական հզորության Pn- ի, անվտանգության գործոնի S- ի և նախագծման տևողության ժամկետը 10,000 ժամ `հաշվի առնելով փոխանցման տուփի արդյունավետությունը:
2 Mn2 [Nm] հանդերձանքի անվանական մոմենտը
Փոխանցման տուփի անվանական մոմենտը առավելագույն մոմենտն է, որը փոխանցման տուփը նախատեսված է անվտանգ փոխանցման համար ՝ ելնելով հետևյալ արժեքներից.
... անվտանգության գործոն S \u003d 1
... ծառայության ժամկետը `10,000 ժամ:
Mn2 արժեքները հաշվարկվում են հետևյալ ստանդարտների համաձայն.
ISO DP 6336 փոխանցումատուփերի համար;
ISO 281 առանցքակալների համար:
3 Առավելագույն մեծ ոլորող մոմենտ M2max [Nm]
Առավելագույն պտտվող մոմենտը ամենաբարձր պտույտն է, որին փոխանցումատուփը կարող է դիմակայել ստատիկ կամ ոչ միատարր բեռի պայմաններում `հաճախակի մեկնարկներով և կանգառներով (այս արժեքը հասկացվում է որպես ակնթարթային պիկ բեռ, երբ փոխանցումատուփն աշխատում է կամ բեռի տակ մոմենտ է սկսում):
4 Պահանջվող ոլորող մոմենտ Mr2 [Nm]
Մոմենտի արժեքը, որը համապատասխանում է հաճախորդի անհրաժեշտ պահանջներին: Այս արժեքը միշտ պետք է լինի պակաս կամ հավասար ընտրված հանդերձանքի միավորի Mn2 անվանական ելքային մոմենտից:
5 Հաշվարկված մոմենտը M c2 [Nm]
Մոմենտի արժեքը, որը պետք է հետևել փոխանցումատուփի ընտրության ժամանակ, հաշվի առնելով Mr2 պահանջվող մոմենտը և սպասարկման գործակիցը fs, հաշվարկվում է բանաձևով.
Փոխանցման միավորների դինամիկ արդյունավետությունը ներկայացված է աղյուսակում (A2)
Այս արժեքը հավասար է փոխանցումատուփի կողմից փոխանցվող մեխանիկական հզորության սահմանափակող արժեքին 20 ° C շրջակա միջավայրի շարունակական աշխատանքի պայմաններում `առանց փոխանցման տուփի հավաքույթների և մասերի վնասելու: 20 ° C- ից և ընդհատվող շահագործումից բացի այլ շրջակա միջավայրի ջերմաստիճանում Pt- ի արժեքը ճշգրտվում է ft ջերմային գործակիցների և աղյուսակում տրված արագության գործոնների համար: Պետք է բավարարել հետևյալ պայմանը.
1 Դինամիկ արդյունավետություն [ηd]
Դինամիկ արդյունավետությունը ելքային լիսեռ P2- ում ստացված հզորության հարաբերությունն է P1 մուտքային լիսեռի վրա կիրառվող հզորությանը:
Յուրաքանչյուր փոխանցումատուփին բնորոշ բնութագիրը, հավասար է n1 մուտքի ռոտացիայի արագության և n2 ելքի արագության հարաբերությանը.
i \u003d n1 / n2 |
1 մուտքային արագություն n1 [min -1]
Պտտվող արագություն, որը մատակարարվում է փոխանցումատուփի մուտքային լիսեռին: Էլեկտրական շարժիչին անմիջական միացման դեպքում այդ արժեքը հավասար է էլեկտրական շարժիչի ելքային արագությանը. Եթե \u200b\u200bայլ շարժիչային էլեմենտների միջոցով միացված է, շարժիչի արագությունը պետք է բաժանվի սնուցման շարժիչի հանդերձանքի հարաբերակցության վրա `փոխանցումատուփի մուտքային արագություն ստանալու համար: Այս դեպքերում խորհուրդ է տրվում փոխանցման տուփը մատակարարել 1400 rpm- ից ցածր պտտման արագությամբ: Մի գերազանցեք աղյուսակում նշված հանդերձանքի մուտքի արագությունը:
2 Արդյունք արագություն n2 [min-1]
N2 ելքային արագությունը կախված է n1 մուտքային արագությունից և i փոխանցման աստիճանից: հաշվարկված բանաձևով.
Գործոնի արժեքը հավասար է փոխանցումատուփի անվանական հզորության և փոխանցումատուփին միացված էլեկտրական շարժիչի իրական հզորության հարաբերակցությանը.
S \u003d Pn1 / P1 |
Կրճատող |
Քայլերի քանակը |
Փոխանցումների տեսակները |
Մուտքային և ելքային լիսեռների առանցքների փոխադարձ դասավորություն |
Գլանաձեւ |
Մեկ փուլ |
Մեկ կամ ավելի գլանաձեւ փոխանցումատուփեր |
Զուգահեռ |
Paraուգահեռ կամ կոխական |
|||
Քառաստիճան |
Զուգահեռ |
||
| Կոնաձև |
Մեկ փուլ |
Մեկ թեք հանդերձանք |
Խաչմերուկում |
Կոնաձեւ գլանաձեւ |
Մեկ թեք հանդերձանք և մեկ կամ ավելի գլանաձեւ փոխանցումատուփեր |
Խաչմերուկում կամ խաչասերում |
|
Որդի |
Մեկ փուլ Երկու փուլ |
Մեկ կամ երկու որդ որդեր |
Միախառնվել |
Զուգահեռ |
|||
Գլանաձեւ-որդ կամ որդ-գլանաձեւ |
Երկու փուլ, երեք փուլ |
Մեկ կամ երկու գլանաձև փոխանցումատուփ և մեկ որդ որդ |
Միախառնվել |
| Մոլորակային |
Մեկ փուլ երկու փուլ երեք փուլ |
Յուրաքանչյուր փուլ բաղկացած է երկու կենտրոնական փոխանցումատուփից և արբանյակներից |
|
| Գլանաձեւ մոլորակային |
Երկու փուլ, երեք փուլ, չորս փուլ |
Մեկ կամ ավելի գլանաձև և մոլորակային շարժակների համադրություն |
Paraուգահեռ կամ կոխական |
| Eveուռ մոլորակային |
Երկու փուլ, երեք փուլ, չորս փուլ |
Մեկ թեք և մոլորակային շարժակների համադրություն |
Խաչմերուկում |
| Մոլորակային որդ |
Երկու փուլ, երեք փուլ, չորս փուլ |
Մեկ ճիճու և մոլորակային շարժակների համադրություն |
Միախառնվել |
Ալիք |
Մեկ փուլ |
Մեկ ալիքի փոխանցում |
Կրճատող |
Մուտքային և ելքային լիսեռների առանցքների տեղը տարածության մեջ |
| 1. axisուգահեռ առանցքի մուտքային և ելքային լիսեռներ | 1. Հորիզոնական; առանցքները տեղակայված են հորիզոնական հարթությունում; առանցքները տեղակայված են ուղղահայաց հարթության մեջ (մուտքային լիսեռով ելքային լիսեռից վեր կամ ներքև); առանցքները տեղակայված են թեք հարթությունում |
| 2. Ուղղահայաց | |
| 2. Մուտքային և ելքային լիսեռների համընկնող առանցքներով (համասեռ) | 1. Հորիզոնական |
| 2. Ուղղահայաց | |
| 3. Մուտքային և ելքային լիսեռների հատման առանցքներով | 1. Հորիզոնական |
| 4. Մուտքային և ելքային լիսեռների խաչված առանցքներով | 1. Հորիզոնական (մուտքային լիսեռով ելքային լիսեռից վեր կամ ներքև) |
| 2. Մուտքային լիսեռի հորիզոնական առանցքը և ելքային լիսեռի ուղղահայաց առանցքը | |
| 3. Մուտքային լիսեռի ուղղահայաց առանցքը և ելքային լիսեռի հորիզոնական առանցքը |
Մոնտաժման եղանակ |
Օրինակ |
| Երկարաձգման ոտքերի կամ վառարանի վրա (առաստաղին կամ պատին). |
|
փոխանցման տուփի բազայի հիմքի հարթության մակարդակում. |
|
փոխանցման տուփի բազայի հիմքի հարթությունից վեր. |
|
| Մուտքային լիսեռի կողային եզր |
|
| Ելքի լիսեռի կողմից եզր |
|
| Կցաշարը մուտքի և ելքի կողմից |
|
| Վարդակ |
|
Ընդհանուր մեքենաշինական կիրառման համար փոխանցման տուփերի և փոխանցման շարժիչների նախագծման խորհրդանիշներ և թվային նշանակումներ. (Արտադրանք) տեղադրման մեթոդի համաձայն սահմանված են ԳՕՍՏ 30164-94-ով:
Կախված դիզայնից, փոխանցման տուփերը և փոխանցման շարժիչները բաժանվում են հետևյալ խմբերի.
ա) համասեռ;
բ) զուգահեռ առանցքներով.
գ) հատվող առանցքներով.
դ) խաչված առանցքներով:
Ա) խումբը ներառում է նաև զուգահեռ առանցքներով ապրանքներ, որոնցում մուտքային և ելքային լիսեռների ծայրերն ուղղված են հակառակ ուղղությամբ, և դրանց կենտրոնական հեռավորությունը 80 մմ-ից ոչ ավելի է:
Բ) և գ) խմբերը ներառում են նաև փոփոխիչներ և փոփոխիչների շարժիչներ: Տեղադրման եղանակով նմուշների պայմանական պատկերները և թվային անվանումները բնութագրում են պատյանների նախագծերը, ինչպես նաև լիսեռների կամ լիսեռի առանցքների տեղադրման մակերեսների տարածության տեղը:
Առաջինը մարմնի կառուցվածքային ձևավորումն է (1 - ոտքերի վրա, 2 - եզրով);
Երկրորդը `մոնտաժային մակերեսի գտնվելու վայրը (1 - հատակ, 2 - առաստաղ, 3 - պատ);
Երրորդը ելքային լիսեռի վերջի գտնվելու վայրն է (1 - ձախից հորիզոնական, 2-ից աջ `հորիզոնական, 3-ից ներքև` ուղղահայաց, 4-ից `ուղղահայաց վերև):
Ա) խմբի ապրանքների խորհրդանիշը բաղկացած է երեք թվից.
առաջինը մարմնի կառուցվածքային ձևավորումն է (1 - ոտքերի վրա; 2 - եզրով); երկրորդը `մոնտաժային մակերեսի գտնվելու վայրը (1 - հատակ; 2 - առաստաղ; 3 - պատ); երրորդը ելքային լիսեռի վերջի գտնվելու վայրն է (1 - ձախից հորիզոնական; աջից `2-ից հորիզոնական. ներքևից` 3 - ուղղահայաց ներքև; 4 - ուղղահայաց վերև):
Բ) և գ) խմբերի արտադրանքի խորհրդանիշը բաղկացած է չորս թվից.
առաջինը մարմնի կառուցվածքային ձևավորումն է (1 - ոտքերի վրա; 2 - եզրով; 3 - տեղադրված; 4 - տեղադրված); երկրորդը `մոնտաժային մակերեսի և լիսեռի առանցքների հարաբերական դիրքը բ խմբի համար). 1 - լիսեռի առանցքներին զուգահեռ. 2 - լիսեռների առանցքներին ուղղահայաց; գ խմբի համար). 1 - լիսեռների առանցքներին զուգահեռ. 2 - ելքային լիսեռի առանցքի ուղղահայաց; 3 - մուտքային լիսեռի առանցքի ուղղահայաց); երրորդ - մոնտաժային մակերեսի գտնվելու վայրը տարածության մեջ (1 - հատակ; 2 - առաստաղ; 3 - ձախ պատ, առջևի, հետևի; 4 - աջ պատ, առջևի, հետևի);
|
չորրորդ - լիսեռների գտնվելու վայրը տիեզերքում խմբի համար բ). 0 - հորիզոնական լիսեռ հորիզոնական հարթությունում; 1 - հորիզոնական լիսեռներ ուղղահայաց հարթությունում; 2 - ուղղահայաց լիսեռ; գ խմբի համար) ՝ 0 - հորիզոնական լիսեռներ; 1 - ուղղահայաց ելքային լիսեռ; 2 - ուղղահայաց մուտքային լիսեռ):
D) խմբի արտադրանքի խորհրդանիշը բաղկացած է չորս թվից.
առաջինը մարմնի կառուցվածքային ձևավորումն է (1 - ոտքերի վրա; 2 - եզրով; 3 - տեղադրված; 4 - տեղադրված);
երկրորդը `մոնտաժային մակերեսի և լիսեռների առանցքների հարաբերական դիրքը (1 - լիսեռների առանցքներին զուգահեռ, որդի կողմից; 2 - լիսեռների առանցքներին զուգահեռ, անիվի կողմից. 3, 4 - ուղղահայաց անիվի առանցքին; 5, 6 - ուղղահայաց որդի առանցքին);
երրորդ - լիսեռների տեղը տարածության մեջ (1 - հորիզոնական լիսեռ; 2 - ուղղահայաց ելքային լիսեռ: 3 - ուղղահայաց մուտքային լիսեռ);
չորրորդ - ճիճու զույգի հարաբերական դիրքը տարածության մեջ (0 - անիվի տակ գտնվող ճիճու; 1 - անիվի վերին ճիճու. 2 - անիվի աջ ճիճու; 3 - անիվի ձախ ճիճու):
Կախովի արտադրանքները տեղադրվում են խոռոչի ելքային լիսեռով, և մարմինը ամրագրվում է մեկ կետում `ռեակտիվ պահի ռոտացիայի դեմ: Մոնտաժված արտադրանքները տեղադրվում են խոռոչ ելքային լիսեռով, և մարմինը անշարժորեն ամրագրվում է մի քանի կետերում:
Փոխանցված շարժիչներում, տեղադրման մեթոդի համաձայն, նախագծի պատկերը պետք է պարունակի ԳՕՍՏ 20373-ի համաձայն շարժիչի ուրվագծի լրացուցիչ պարզեցված պատկեր:
Նշանների և պատկերների օրինակներ.
121 - կոխական փոխանցումատուփ, ոտքերի վրա պատյանների ձևավորում, առաստաղին տեղադրում, հորիզոնական լիսեռներ, ձախ կողմում ելքային լիսեռ (նկ. 1, ա);
2231 - ռեդուկտոր զուգահեռ առանցքներով, պատյանով պատյան, հանքերի առանցքներին ուղղահայաց մոնտաժող մակերես, ձախ պատին ամրացնելով, ուղղահայաց հարթության վրա հորիզոնական հանքեր (նկ. 1, բ);
3120 - խաչմերուկային առանցքներով փոխանցվող տուփ, կախովի պատյան, հանքերի առանցքներին զուգահեռ մոնտաժող մակերես, առաստաղին ամրացված, հորիզոնական հանքեր (նկ. 1, գ);
4323 - խաչաձեւ առանցքներով փոխանցման տուփ, թաղանթապատված դիզայնով, անիվի առանցքին ուղղահայաց մոնտաժային մակերեսով, ելքի ուղղահայաց լիսեռով, անիվից ձախ որդ (նկ. 1, դ): LLLL սիմվոլը նշանակում է արտադրանքի ֆիքսման կետը պտտման դեմ ռեակտիվ պահով և խոռոչ ելքային լիսեռի ամրացումով շարժիչ մեքենայի լիսեռին:
Պահանջվող շարժիչի հզորությունը որոշվում է բանաձևով. Եթե T 2 - ելքային լիսեռի մոմենտը (Nm); n 2 - արագությունը ...
Թեմա 10. Օդանավերի վառելիքի համակարգ: Ընդհանուր տեղեկություն. Վառելիքի մատակարարման համակարգը նախատեսված է օդանավի վրա տեղադրելու համար ...
ՊԱՇՏՊԱՆՈՒԹՅԱՆ ԵՎ ՏՐԱՆՍՊՈՐՏԻ ՄԵՔԵՆԱՆԵՐ Հիմնային մեքենայի վրա, հետքերով տրակտոր 3 (Նկար 1.1), կարելի է տեղադրել բուլդոզեր ...

Ռուսաստանի Դաշնության կրթության և գիտության նախարարությունը բարձրագույն կրթության պետական \u200b\u200bուսումնական հաստատություն ...
Գործատուն պարտավոր է անցկացնել աշխատողների աշխատանքի պաշտպանության վերաբերյալ գիտելիքների ուսուցում և ստուգում: Այս հոդվածում մենք ձեզ ցույց կտանք, թե ինչպես ...

Կառավարող ընկերությունը վատ է գործում: Թե՞ սկսել եք կասկածել, որ ձեր փողերը գնում են «սխալ տեղում»: Թե՞ ձեր Մեծ Բրիտանիան պարզապես ...
Ընկերության արժեքի կառավարման տեսական և մեթոդաբանական հիմքերը Ձևավորված տնտեսությունում արժեքի կառավարումը ...

Մանրածախի խնդիրներից մեկը ՝ ծախսերը կրճատելիս, ասում է Պայքլ Կովտուն, Mycroft- ի տնօրեն ...

Organizationalրագրի կազմակերպական կառուցվածքների տեսակները Նպատակների վերակողմնորոշման հետ կապված խնդրահարույց առաջադրանքներ լուծելիս ...
Կանխիկի կառավարման ավտոմատացված տեղեկատվական համակարգի ներդրման նախագիծ (կենտրոնացված ...
Summaryրագրի ամփոփագիր րագրի նպատակն է ավելի քան 500 հազար բնակչություն ունեցող քաղաքում կենդանիների կենդանաբանական այգու բացում `...

Գյուղատնտեսության և սննդի արդյունաբերության մեջ տրանսպորտային միջոցների ախտահանումը հսկայական դեր ունի ...

Փաթեթավորման ցուցակն օգտագործվում է տարբեր տեսակի ապրանքների տեղափոխման համար: Դա ...

Կազմակերպության ղեկավարը համապատասխան կարգադրություն է տալիս հավաստագրման վերաբերյալ: Այն սահմանում է ամսաթիվը ...
Հեռանկարի դեֆորմացման գործառույթը շատ օգտակար է ինչպես դիզայներների, այնպես էլ լուսանկարիչների համար: Այս գործառույթով դուք կարող եք ...

Բայց բոլորը երգի բառեր են, բանը դրանում չէ: Աշխատանքի տեսչությունը կարծում է, որ գործատուն պետք է վճարի, դուք ասում եք ՝ ոչ ...